PaTS轮子
PaTS-Wheel
使用说明
- 所有模型资源均由用户上传分享,内容来源于网络公开资源
- 侵权投诉:通过抖音私信 @jobsfan 联系我们(需附版权证明),24小时内处理
- 模型将通过邮件发送(5分钟内自动发送),感谢理解带宽压力,超过1小时没收到,请联系我们
关于费用
我们是爱好者共建社区,为维持服务器成本,每个模型收取微量费用(仅覆盖基础开支)。我们承诺最低成本运营,感谢您的支持!
扫码手机访问
抖音私信 @jobsfan
摘要
不是我的模型。根据这段视频的剧照制作:
https://www.youtube.com/watch?v=oZbZZlDDEnc&t=90s
详情请参见原作者。如果存在冲突,我很乐意删除此内容!
学分
T.戈登, B. W. MulveyE. Redgrave 和 T. Nanayakkara,"PaTS-Wheel:用于移动机器人在无结构地形上导航的被动可变换单部件车轮”,《电气与电子工程师学会机器人与自动化通讯》,2024 年。
论文链接: https://ieeexplore.ieee.org/document/ ...
数字对象标识符:10.1109/LRA.2024.3389828
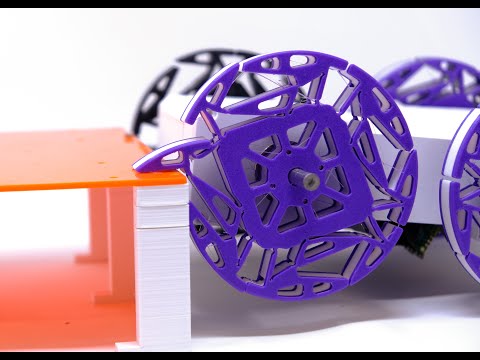
摘要
大多数移动机器人使用的轮子在平整和结构化的地面上(如工厂和仓库)表现良好。然而,它们在穿越阶梯状障碍物等非结构化地形时却面临挑战。本文介绍了 PaTS-Wheel 的设计和测试情况:PaTS-Wheel 是一种可被动变换的单部件轮子,遇到障碍物时可变换呈现钩状。这种有用的形态特征的被动呈现完全由障碍物的几何形状引导。PaTS-Wheel 在平地上的能耗和振动情况与相同尺寸的标准轮子相当。此外,我们还测试了新颖的轮子设计在不同地形上穿越高度递增的阶梯形障碍物的情况。在穿越高度≈直径 70% 的阶梯形障碍物时,PaTS-Wheel 的成功率达到 100%,高于同等大小的轮子(直径≈25%)和同等大小的车轮(直径≈61%)。这就实现了将轮子的能效和行驶平稳性与腿式机器人的障碍物穿越能力相结合的设计目标,而这一切都不需要任何传感器、致动器或控制器。



联系我们
热门推荐
-
 PGO BR200 验车速度传感器盒2023-08-09
PGO BR200 验车速度传感器盒2023-08-09 -
 老板螃蟹 KGC-0102023-09-08
老板螃蟹 KGC-0102023-09-08 -
 JBL Partybox 310 3D脚垫橡胶脚侧用型号2023-09-09
JBL Partybox 310 3D脚垫橡胶脚侧用型号2023-09-09 -
 空气软枪缓冲管板 (AEG, 后置连接木制部件)2024-01-03
空气软枪缓冲管板 (AEG, 后置连接木制部件)2024-01-03 -
 自行车钥匙扣2024-01-05
自行车钥匙扣2024-01-05
最热下载
-
 车身RC 1/10 全套2023-03-26
车身RC 1/10 全套2023-03-26 -
 MK47 模组道具枪2023-03-26
MK47 模组道具枪2023-03-26 -
 数字世界12342024-01-03
数字世界12342024-01-03 -
 硫化机模型2024-04-13
硫化机模型2024-04-13 -
 Halo Reach巴黎级大型战舰2024-05-05
Halo Reach巴黎级大型战舰2024-05-05
最新模型
-
 模块化笔筒链2025-07-19
模块化笔筒链2025-07-19 -
 弹弓HGX-FRAME V1A2025-07-18
弹弓HGX-FRAME V1A2025-07-18 -
 3d打印的男人凉鞋2025-07-17
3d打印的男人凉鞋2025-07-17 -
 碧奇公主;桃子公主;水蜜桃公主2025-07-16
碧奇公主;桃子公主;水蜜桃公主2025-07-16
